BME280 Driver. More...
Modules | |
| Private Resources | |
| only for internal library purposes | |
| Library Configuration | |
| Set library options here. | |
| Public functions | |
| Use these functions only. | |
| BME280 Returnd Values | |
| Values that can be returned by the driver's functions. | |
| BME280 I2C Address | |
| Address on I2C bus. | |
| BME280 Registers | |
| Definition of register addresses and lenghts. | |
| BME280 Settings | |
| Inernal sensor's settings that can be changed. | |
| Function pointers | |
| Platform speicific functions. | |
| Public typedefs | |
| Typedefs for internal calculations. | |
Data Structures | |
| struct | BME280_calibration_data |
| Keeps calibration data that were read from sensor. More... | |
| struct | BME280_Driver_t |
| Keeps all data specific for used platform. More... | |
| struct | BME280_t |
| Keeps all data related to a single sensor. More... | |
| struct | BME280_Config_t |
| Contains all sensor's settings. More... | |
| struct | BME280_Data_t |
| Contains result of measure (no floating points variables) More... | |
| struct | BME280_DataF_t |
| Contains result of measure (with floating points variables) More... | |
Functions | |
| int8_t | BME280_Init (BME280_t *Dev, BME280_Driver_t *Driver) |
| Function to initialize sensor and resources. | |
| int8_t | BME280_ConfigureAll (BME280_t *Dev, BME280_Config_t *Config) |
| Function to set all sensor settings at once. | |
| int8_t | BME280_Reset (BME280_t *Dev) |
| Function to perform sensor's software reset. | |
| int8_t | BME280_GetMode (BME280_t *Dev, uint8_t *Mode) |
| Function gets current Operating Mode from sensor. | |
| int8_t | BME280_GetPOvs (BME280_t *Dev, uint8_t *POvs) |
| Function gets current pressure Oversampling from sensor. | |
| int8_t | BME280_GetTOvs (BME280_t *Dev, uint8_t *TOvs) |
| Function gets current temperature Oversampling from sensor. | |
| int8_t | BME280_GetHOvs (BME280_t *Dev, uint8_t *HOvs) |
| Function gets current humidity Oversampling from sensor. | |
| int8_t | BME280_GetTStby (BME280_t *Dev, uint8_t *TStby) |
| Function gets current Standby Time from sensor. | |
| int8_t | BME280_GetTFilter (BME280_t *Dev, uint8_t *Filter) |
| Function gets current IIR Filter coeficient from sensor. | |
| int8_t | BME280_Is3WireSPIEnabled (BME280_t *Dev, uint8_t *Result) |
| Function checks if 3-wire SPI is enabled. | |
| int8_t | BME280_SetMode (BME280_t *Dev, uint8_t Mode) |
| Function sets sensor's Operating Mode. | |
| int8_t | BME280_SetPOvs (BME280_t *Dev, uint8_t POvs) |
| Function sets sensor's pressure Oversampling. | |
| int8_t | BME280_SetTOvs (BME280_t *Dev, uint8_t TOvs) |
| Function sets sensor's temperature Oversampling. | |
| int8_t | BME280_SetHOvs (BME280_t *Dev, uint8_t HOvs) |
| Function sets sensor's humidity Oversampling. | |
| int8_t | BME280_SetTStby (BME280_t *Dev, uint8_t TStby) |
| Function sets sensor's Standby Time. | |
| int8_t | BME280_SetFilter (BME280_t *Dev, uint8_t Filter) |
| Function sets sensor's IIR Filter coeficient. | |
| int8_t | BME280_Enable3WireSPI (BME280_t *Dev) |
| Function enables 3-wire SPI bus. | |
| int8_t | BME280_Disable3WireSPI (BME280_t *Dev) |
| Function disables 3-wire SPI bus. | |
| int8_t | BME280_ReadAllLast (BME280_t *Dev, BME280_Data_t *Data) |
| Function reads all measured data at once. | |
| int8_t | BME280_ReadTempLast (BME280_t *Dev, int8_t *TempInt, uint8_t *TempFract) |
| Function reads last measured temperature. | |
| int8_t | BME280_ReadPressLast (BME280_t *Dev, uint16_t *PressInt, uint16_t *PressFract) |
| Function reads last measured pressure. | |
| int8_t | BME280_ReadHumLast (BME280_t *Dev, uint8_t *HumInt, uint16_t *HumFract) |
| Function reads last measured humidity. | |
| int8_t | BME280_ReadAllForce (BME280_t *Dev, BME280_Data_t *Data) |
| Function forces single measure and returns all data as integers. | |
| int8_t | BME280_ReadTempForce (BME280_t *Dev, int8_t *TempInt, uint8_t *TempFract) |
| Function forces single measure and returns temperatrue as integers (forced mode) | |
| int8_t | BME280_ReadPressForce (BME280_t *Dev, uint16_t *PressInt, uint16_t *PressFract) |
| Function forces single measure and returns pressure as integers (forced mode) | |
| int8_t | BME280_ReadHumForce (BME280_t *Dev, uint8_t *HumInt, uint16_t *HumFract) |
| Function forces single measure and returns humidity as integers (forced mode) | |
| int8_t | BME280_ReadAllLast_F (BME280_t *Dev, BME280_DataF_t *Data) |
| Function reads all measured data at once. | |
| int8_t | BME280_ReadTempLast_F (BME280_t *Dev, float *Temp) |
| Function reads last measured temperature. | |
| int8_t | BME280_ReadPressLast_F (BME280_t *Dev, float *Press) |
| Function reads last measured pressure. | |
| int8_t | BME280_ReadHumLast_F (BME280_t *Dev, float *Hum) |
| Function reads last measured humidity. | |
| int8_t | BME280_ReadAllForce_F (BME280_t *Dev, BME280_DataF_t *Data) |
| Function forces single measure and returns all data as floats. | |
| int8_t | BME280_ReadTempForce_F (BME280_t *Dev, float *Temp) |
| Function forces single measure and returns temperatrue as floats (forced mode) | |
| int8_t | BME280_ReadPressForce_F (BME280_t *Dev, float *Press) |
| Function forces single measure and returns pressure as floats (forced mode) | |
| int8_t | BME280_ReadHumForce_F (BME280_t *Dev, float *Hum) |
| Function forces single measure and returns humidity as floats (forced mode) | |
Detailed Description
BME280 Driver.
Function Documentation
◆ BME280_ConfigureAll()
| int8_t BME280_ConfigureAll | ( | BME280_t * | Dev, |
| BME280_Config_t * | Config | ||
| ) |
Function to set all sensor settings at once.
- Note
- Sensor must be in BME280_SLEEPMODE to set all parameters. Force BME280_SLEEPMODE with BME280_SetMode function before or use it directly after BME280_Init function only.
Function writes all 3 config registers without reading them before. It can be usefull after power-up or reset. It sets current operating mode inside *Dev structure at the end.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [in] *Config pointer to BME280_Config_t structure which contains all paramaters to be set
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE


◆ BME280_Disable3WireSPI()
| int8_t BME280_Disable3WireSPI | ( | BME280_t * | Dev | ) |
Function disables 3-wire SPI bus.
- Note
- Sensor must be in BME280_SLEEPMODE to set this parameter. Force BME280_SLEEPMODE with BME280_SetMode function before or use it directly after BME280_Init function only.
Function reads single register from sensor, and checks if current value matches value requested by user. If matches, function skips write operation and returns BME280_OK. If doesnt, it prepares and sends new register value.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE

◆ BME280_Enable3WireSPI()
| int8_t BME280_Enable3WireSPI | ( | BME280_t * | Dev | ) |
Function enables 3-wire SPI bus.
- Note
- Sensor must be in BME280_SLEEPMODE to set this parameter. Force BME280_SLEEPMODE with BME280_SetMode function before or use it directly after BME280_Init function only.
Function reads single register from sensor, and checks if current value matches value requested by user. If matches, function skips write operation and returns BME280_OK. If doesnt, it prepares and sends new register value.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE

◆ BME280_GetHOvs()
| int8_t BME280_GetHOvs | ( | BME280_t * | Dev, |
| uint8_t * | HOvs | ||
| ) |
Function gets current humidity Oversampling from sensor.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *HOvs pointer to vartiable where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value

◆ BME280_GetMode()
| int8_t BME280_GetMode | ( | BME280_t * | Dev, |
| uint8_t * | Mode | ||
| ) |
Function gets current Operating Mode from sensor.
Function updates current operating mode inside *Dev structure as well.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Mode pointer to vartiable where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value

◆ BME280_GetPOvs()
| int8_t BME280_GetPOvs | ( | BME280_t * | Dev, |
| uint8_t * | POvs | ||
| ) |
Function gets current pressure Oversampling from sensor.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *POvs pointer to vartiable where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value

◆ BME280_GetTFilter()
| int8_t BME280_GetTFilter | ( | BME280_t * | Dev, |
| uint8_t * | Filter | ||
| ) |
Function gets current IIR Filter coeficient from sensor.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Filter pointer to vartiable where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value

◆ BME280_GetTOvs()
| int8_t BME280_GetTOvs | ( | BME280_t * | Dev, |
| uint8_t * | TOvs | ||
| ) |
Function gets current temperature Oversampling from sensor.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *TOvs pointer to vartiable where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value

◆ BME280_GetTStby()
| int8_t BME280_GetTStby | ( | BME280_t * | Dev, |
| uint8_t * | TStby | ||
| ) |
Function gets current Standby Time from sensor.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *TStby pointer to vartiable where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value

◆ BME280_Init()
| int8_t BME280_Init | ( | BME280_t * | Dev, |
| BME280_Driver_t * | Driver | ||
| ) |
Function to initialize sensor and resources.
- Note
- This must be a first function usend in code before any other opearion can be performed!
Init funtion performs sensor reset and checks BME280_ID. It doesn't set any sensor's parameters. Calibration data specific for each one sensor are read while Init function. If operation is completed with success function sets "initialized" value in BME280_t structure.
- Parameters
-
[in] *Dev pointer to BME280_t structure which should be initialized [in] *Driver pointer to BME280_Driver_t structure where all platform specific data are stored. This structure MUST exist while program is running - do not use local structures to init sensor!
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_ID_ERR sensor's id doesnt match with BME280_ID

◆ BME280_Is3WireSPIEnabled()
| int8_t BME280_Is3WireSPIEnabled | ( | BME280_t * | Dev, |
| uint8_t * | Result | ||
| ) |
Function checks if 3-wire SPI is enabled.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Result pointer to vartiable where result will be stored, 0 - disabled, 1 - enabled
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value

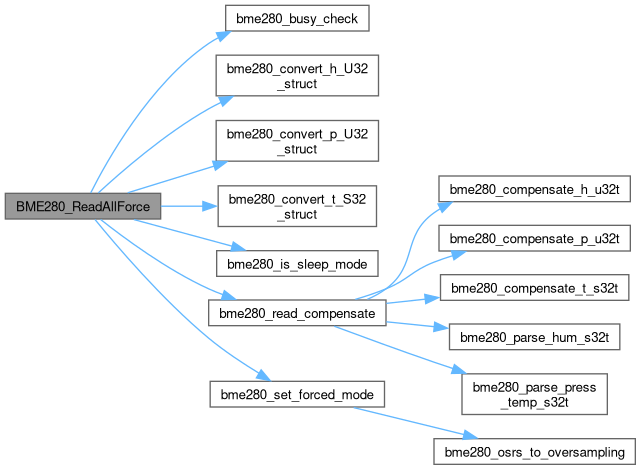
◆ BME280_ReadAllForce()
| int8_t BME280_ReadAllForce | ( | BME280_t * | Dev, |
| BME280_Data_t * | Data | ||
| ) |
Function forces single measure and returns all data as integers.
- Note
- Sensor must be in BME280_SLEEPMODE to force a single measurement.
Function reads sensor's configuration to check conditions and calculate max. delay time required for measure cycle. Then sends command to force single measurement and calls used-defined delay function. When delay function returns ir reads all adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into BME280_Data_t structure.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Data pointer to structure where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
- BME280_BUSY_ERR sensor is busy so cannot proceed

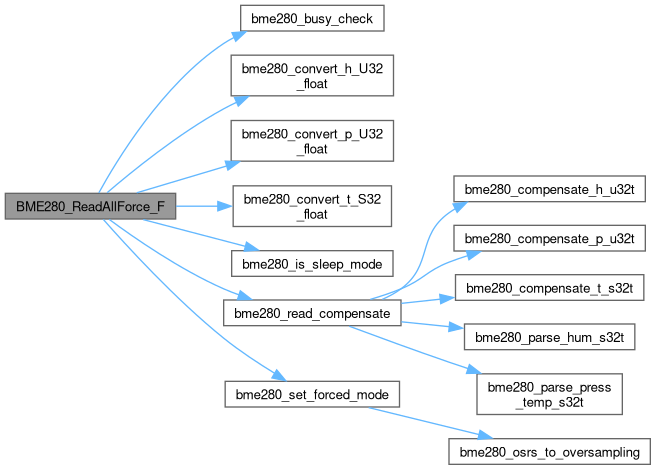
◆ BME280_ReadAllForce_F()
| int8_t BME280_ReadAllForce_F | ( | BME280_t * | Dev, |
| BME280_DataF_t * | Data | ||
| ) |
Function forces single measure and returns all data as floats.
- Note
- Sensor must be in BME280_SLEEPMODE to force a single measurement.
Function reads sensor's configuration to check conditions and calculate max. delay time required for measure cycle. Then sends command to force single measurement and calls used-defined delay function. When delay function returns ir reads all adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into BME280_DataF_t structure.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Data pointer to structure where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
- BME280_BUSY_ERR sensor is busy so cannot proceed
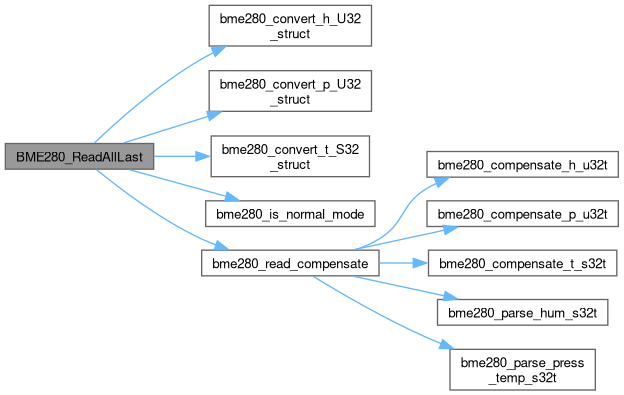
◆ BME280_ReadAllLast()
| int8_t BME280_ReadAllLast | ( | BME280_t * | Dev, |
| BME280_Data_t * | Data | ||
| ) |
Function reads all measured data at once.
- Note
- Sensor must be in BME280_NORMALMODE to read last measured values.
Function reads all adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into BME280_Data_t structure.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Data pointer to structure where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_NORMALMODE

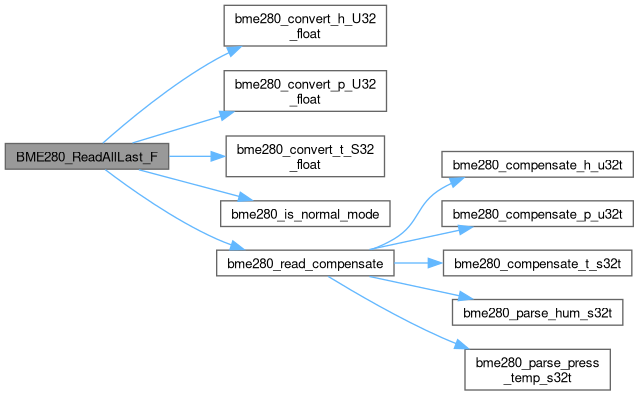
◆ BME280_ReadAllLast_F()
| int8_t BME280_ReadAllLast_F | ( | BME280_t * | Dev, |
| BME280_DataF_t * | Data | ||
| ) |
Function reads all measured data at once.
- Note
- Sensor must be in BME280_NORMALMODE to read last measured values.
Function reads all adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into BME280_DataF_t structure.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Data pointer to structure where result will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_NORMALMODE
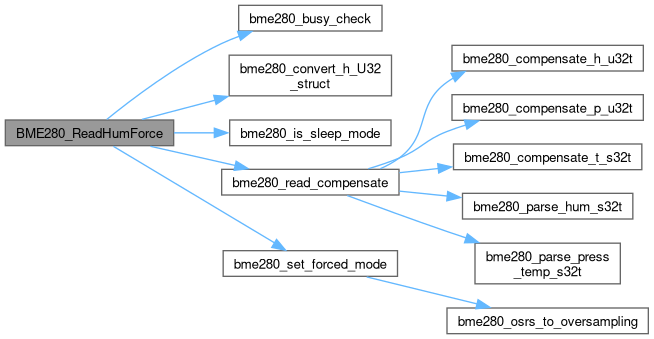
◆ BME280_ReadHumForce()
| int8_t BME280_ReadHumForce | ( | BME280_t * | Dev, |
| uint8_t * | HumInt, | ||
| uint16_t * | HumFract | ||
| ) |
Function forces single measure and returns humidity as integers (forced mode)
- Note
- Sensor must be in BME280_SLEEPMODE to force a single measurement.
Function reads sensor's configuration to check conditions and calculate max. delay time required for measure cycle. Then sends command to force single measurement and calls used-defined delay function. When delay function returns ir reads temperarure and humidity related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into integer (*HumInt) and fractial part (*HumFract).
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *HumInt pointer to variable where integer part of humidity will be stored [out] *HumFract pointer to variable where fractial part of humidity will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
- BME280_BUSY_ERR sensor is busy so cannot proceed
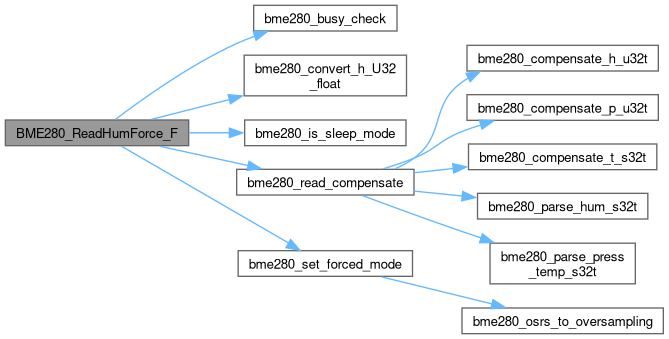
◆ BME280_ReadHumForce_F()
| int8_t BME280_ReadHumForce_F | ( | BME280_t * | Dev, |
| float * | Hum | ||
| ) |
Function forces single measure and returns humidity as floats (forced mode)
- Note
- Sensor must be in BME280_SLEEPMODE to force a single measurement.
Function reads sensor's configuration to check conditions and calculate max. delay time required for measure cycle. Then sends command to force single measurement and calls used-defined delay function. When delay function returns ir reads temperature and humidity related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into float.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Hum pointer to variable where humidity will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
- BME280_BUSY_ERR sensor is busy so cannot proceed
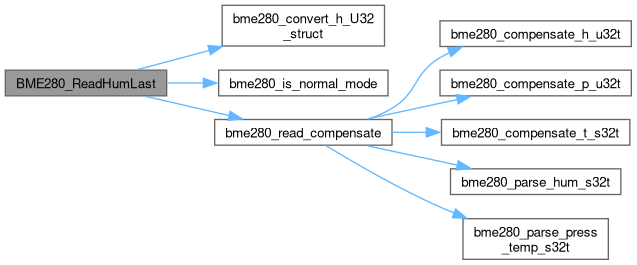
◆ BME280_ReadHumLast()
| int8_t BME280_ReadHumLast | ( | BME280_t * | Dev, |
| uint8_t * | HumInt, | ||
| uint16_t * | HumFract | ||
| ) |
Function reads last measured humidity.
- Note
- Sensor must be in BME280_NORMALMODE to read last measured values.
Function reads temperature and humidity related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated value is then converted into integer part and fractial part and stored in external variables
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *HumInt pointer to variable where integer part of humidity will be stored [out] *HumFract pointer to variable where fractial part of humidity will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_NORMALMODE
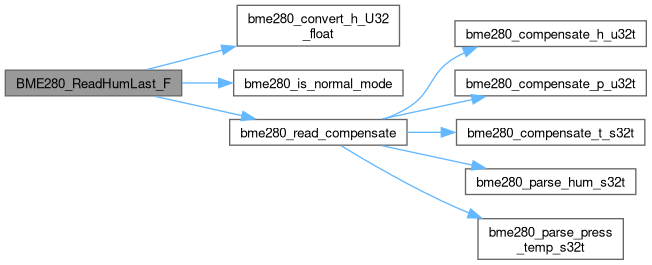
◆ BME280_ReadHumLast_F()
| int8_t BME280_ReadHumLast_F | ( | BME280_t * | Dev, |
| float * | Hum | ||
| ) |
Function reads last measured humidity.
- Note
- Sensor must be in BME280_NORMALMODE to read last measured values.
Function reads temperature and humidity related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated value is then converted into floating point value and stored in external variable
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Hum pointer to variable where temperature will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_NORMALMODE
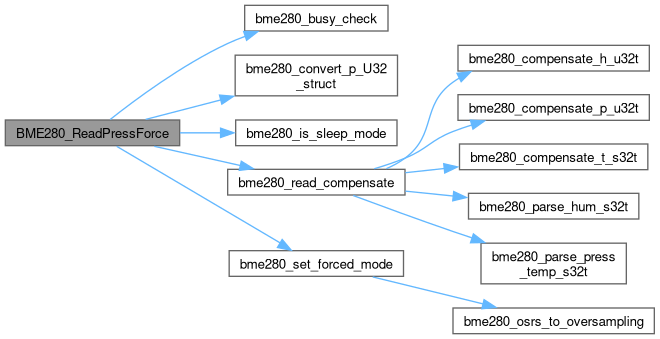
◆ BME280_ReadPressForce()
| int8_t BME280_ReadPressForce | ( | BME280_t * | Dev, |
| uint16_t * | PressInt, | ||
| uint16_t * | PressFract | ||
| ) |
Function forces single measure and returns pressure as integers (forced mode)
- Note
- Sensor must be in BME280_SLEEPMODE to force a single measurement.
Function reads sensor's configuration to check conditions and calculate max. delay time required for measure cycle. Then sends command to force single measurement and calls used-defined delay function. When delay function returns ir reads temperarure and pressure related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into integer (*PressInt) and fractial part (*PressFract).
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *PressInt pointer to variable where integer part of pressure will be stored [out] *PressFract pointer to variable where fractial part of pressure will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
- BME280_BUSY_ERR sensor is busy so cannot proceed
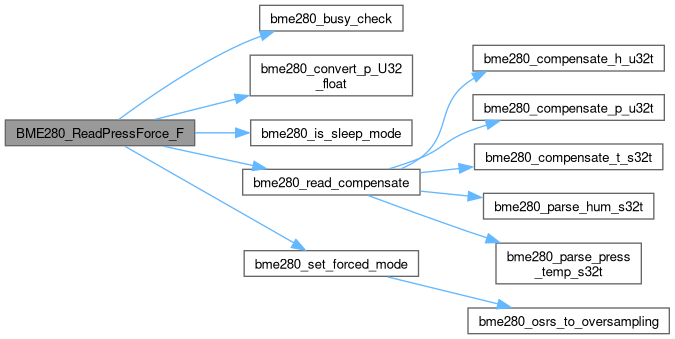
◆ BME280_ReadPressForce_F()
| int8_t BME280_ReadPressForce_F | ( | BME280_t * | Dev, |
| float * | Press | ||
| ) |
Function forces single measure and returns pressure as floats (forced mode)
- Note
- Sensor must be in BME280_SLEEPMODE to force a single measurement.
Function reads sensor's configuration to check conditions and calculate max. delay time required for measure cycle. Then sends command to force single measurement and calls used-defined delay function. When delay function returns ir reads temperature and pressure related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into float.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Press pointer to variable where pressure will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
- BME280_BUSY_ERR sensor is busy so cannot proceed
◆ BME280_ReadPressLast()
| int8_t BME280_ReadPressLast | ( | BME280_t * | Dev, |
| uint16_t * | PressInt, | ||
| uint16_t * | PressFract | ||
| ) |
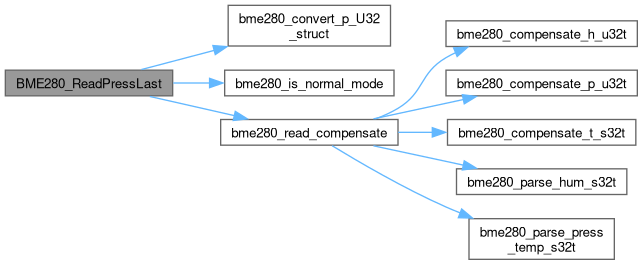
Function reads last measured pressure.
- Note
- Sensor must be in BME280_NORMALMODE to read last measured values.
Function reads temperature and pressure related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated value is then converted into integer part and fractial part and stored in external variables
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *PressInt pointer to variable where integer part of pressure will be stored [out] *PressFract pointer to variable where fractial part of pressure will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_NORMALMODE
◆ BME280_ReadPressLast_F()
| int8_t BME280_ReadPressLast_F | ( | BME280_t * | Dev, |
| float * | Press | ||
| ) |
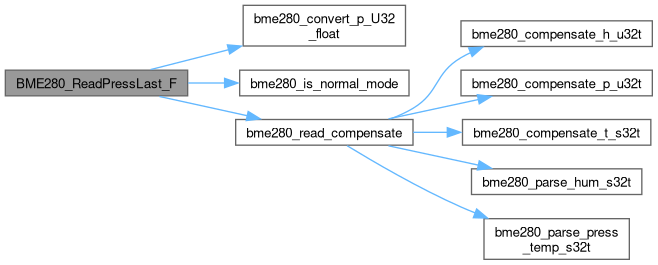
Function reads last measured pressure.
- Note
- Sensor must be in BME280_NORMALMODE to read last measured values.
Function reads temperature and pressure related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated value is then converted into floating point value and stored in external variable
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Press pointer to variable where temperature will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_NORMALMODE
◆ BME280_ReadTempForce()
| int8_t BME280_ReadTempForce | ( | BME280_t * | Dev, |
| int8_t * | TempInt, | ||
| uint8_t * | TempFract | ||
| ) |
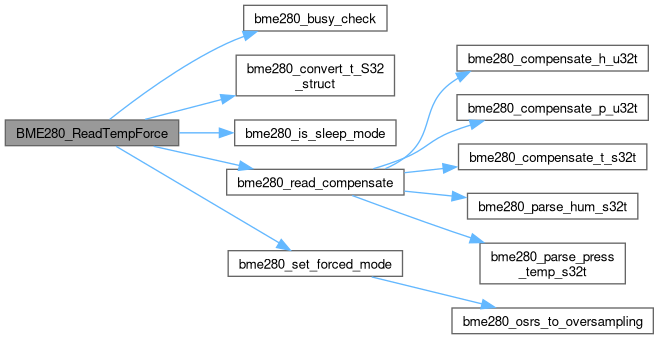
Function forces single measure and returns temperatrue as integers (forced mode)
- Note
- Sensor must be in BME280_SLEEPMODE to force a single measurement.
Function reads sensor's configuration to check conditions and calculate max. delay time required for measure cycle. Then sends command to force single measurement and calls used-defined delay function. When delay function returns ir reads temperature related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into integer (*TempInt) and fractial part (*TempFract).
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *TempInt pointer to variable where integer part of temperature will be stored [out] *TempFract pointer to variable where fractial part of temperature will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
- BME280_BUSY_ERR sensor is busy so cannot proceed
◆ BME280_ReadTempForce_F()
| int8_t BME280_ReadTempForce_F | ( | BME280_t * | Dev, |
| float * | Temp | ||
| ) |
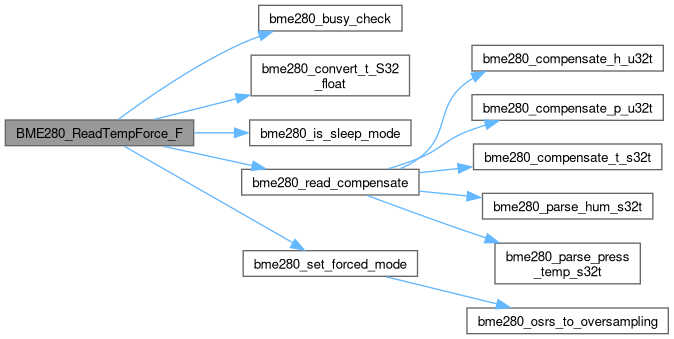
Function forces single measure and returns temperatrue as floats (forced mode)
- Note
- Sensor must be in BME280_SLEEPMODE to force a single measurement.
Function reads sensor's configuration to check conditions and calculate max. delay time required for measure cycle. Then sends command to force single measurement and calls used-defined delay function. When delay function returns ir reads temperature related adc values from sensor, converts them into single variables and compensate with use BME280_calibration_data. Compensated values are then converted into float.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Temp pointer to variable where temperature will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
- BME280_BUSY_ERR sensor is busy so cannot proceed
◆ BME280_ReadTempLast()
| int8_t BME280_ReadTempLast | ( | BME280_t * | Dev, |
| int8_t * | TempInt, | ||
| uint8_t * | TempFract | ||
| ) |
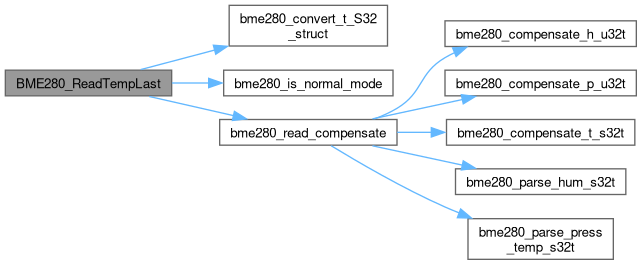
Function reads last measured temperature.
- Note
- Sensor must be in BME280_NORMALMODE to read last measured values.
Function reads temperature related adc values from sensor, converts them into single variable and compensate with use BME280_calibration_data. Compensated value is then converted into integer part and fractial part and stored in external variables
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *TempInt pointer to variable where integer part of temperature will be stored [out] *TempFract pointer to variable where fractial part of temperature will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_NORMALMODE
◆ BME280_ReadTempLast_F()
| int8_t BME280_ReadTempLast_F | ( | BME280_t * | Dev, |
| float * | Temp | ||
| ) |
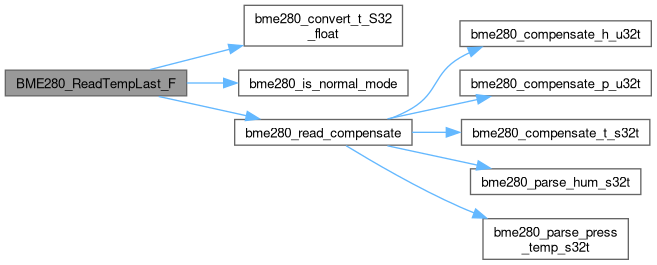
Function reads last measured temperature.
- Note
- Sensor must be in BME280_NORMALMODE to read last measured values.
Function reads temperature related adc values from sensor, converts them into single variable and compensate with use BME280_calibration_data. Compensated value is then converted into floating point value and stored in external variable
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [out] *Temp pointer to variable where temperature will be stored
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_NORMALMODE
◆ BME280_Reset()
| int8_t BME280_Reset | ( | BME280_t * | Dev | ) |
Function to perform sensor's software reset.
Function sends BME280_RESET_VALUE to BME280_RESET_ADDR. To perform this operation bme280_writeregister function must be set inside BME280_t *Dev structure. Function sets "sleep_mode" inside *Dev structure after reset.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed or bme280_writeregister function is not set
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value

◆ BME280_SetFilter()
| int8_t BME280_SetFilter | ( | BME280_t * | Dev, |
| uint8_t | Filter | ||
| ) |
Function sets sensor's IIR Filter coeficient.
- Note
- Sensor must be in BME280_SLEEPMODE to set this parameter. Force BME280_SLEEPMODE with BME280_SetMode function before or use it directly after BME280_Init function only.
Function reads single register from sensor, and checks if current value matches value requested by user. If matches, function skips write operation and returns BME280_OK. If doesnt, it prepares and sends new register value.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [in] Filter value to be set, must be in range of IIR Filter
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE

◆ BME280_SetHOvs()
| int8_t BME280_SetHOvs | ( | BME280_t * | Dev, |
| uint8_t | HOvs | ||
| ) |
Function sets sensor's humidity Oversampling.
- Note
- Sensor must be in BME280_SLEEPMODE to set this parameter. Force BME280_SLEEPMODE with BME280_SetMode function before or use it directly after BME280_Init function only.
Function reads single register from sensor, and checks if current value matches value requested by user. If matches, function skips write operation and returns BME280_OK. If doesnt, it prepares and sends new register value.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [in] HOvs value to be set, must be in range of Oversampling
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE

◆ BME280_SetMode()
| int8_t BME280_SetMode | ( | BME280_t * | Dev, |
| uint8_t | Mode | ||
| ) |
Function sets sensor's Operating Mode.
Function reads single register from sensor, and checks if current mode matches mode requested by user. If matches, function skips write operation and returns BME280_OK. If doesnt, it prepares and sends new register value, then sets correct operating mode inside *Dev structure.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [in] Mode value to be set, must be in range of Operating Mode
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before

◆ BME280_SetPOvs()
| int8_t BME280_SetPOvs | ( | BME280_t * | Dev, |
| uint8_t | POvs | ||
| ) |
Function sets sensor's pressure Oversampling.
- Note
- Sensor must be in BME280_SLEEPMODE to set this parameter. Force BME280_SLEEPMODE with BME280_SetMode function before or use it directly after BME280_Init function only.
Function reads single register from sensor, and checks if current value matches value requested by user. If matches, function skips write operation and returns BME280_OK. If doesnt, it prepares and sends new register value.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [in] POvs value to be set, must be in range of Oversampling
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE

◆ BME280_SetTOvs()
| int8_t BME280_SetTOvs | ( | BME280_t * | Dev, |
| uint8_t | TOvs | ||
| ) |
Function sets sensor's temperature Oversampling.
- Note
- Sensor must be in BME280_SLEEPMODE to set this parameter. Force BME280_SLEEPMODE with BME280_SetMode function before or use it directly after BME280_Init function only.
Function reads single register from sensor, and checks if current value matches value requested by user. If matches, function skips write operation and returns BME280_OK. If doesnt, it prepares and sends new register value.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [in] TOvs value to be set, must be in range of Oversampling
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE

◆ BME280_SetTStby()
| int8_t BME280_SetTStby | ( | BME280_t * | Dev, |
| uint8_t | TStby | ||
| ) |
Function sets sensor's Standby Time.
- Note
- Sensor must be in BME280_SLEEPMODE to set this parameter. Force BME280_SLEEPMODE with BME280_SetMode function before or use it directly after BME280_Init function only.
Function reads single register from sensor, and checks if current value matches value requested by user. If matches, function skips write operation and returns BME280_OK. If doesnt, it prepares and sends new register value.
- Parameters
-
[in] *Dev pointer to sensor's BME280_t structure [in] TStby value to be set, must be in range of Standby Time
- Returns
- BME280_OK success
- BME280_PARAM_ERR wrong parameter passed
- BME280_INTERFACE_ERR user defined read/write function returned non-zero value
- BME280_NO_INIT_ERR sensor was not initialized before
- BME280_CONDITION_ERR sensor is not in BME280_SLEEPMODE
